テクニカルリファレンス< SMC-4DL-PCI, SMC-8DL-PCI, SMC-4DL-PE, SMC-8DL-PE >
株式会社コンテック
20/30
2011 年 5 月 13 日
4. オペレーションコマンド
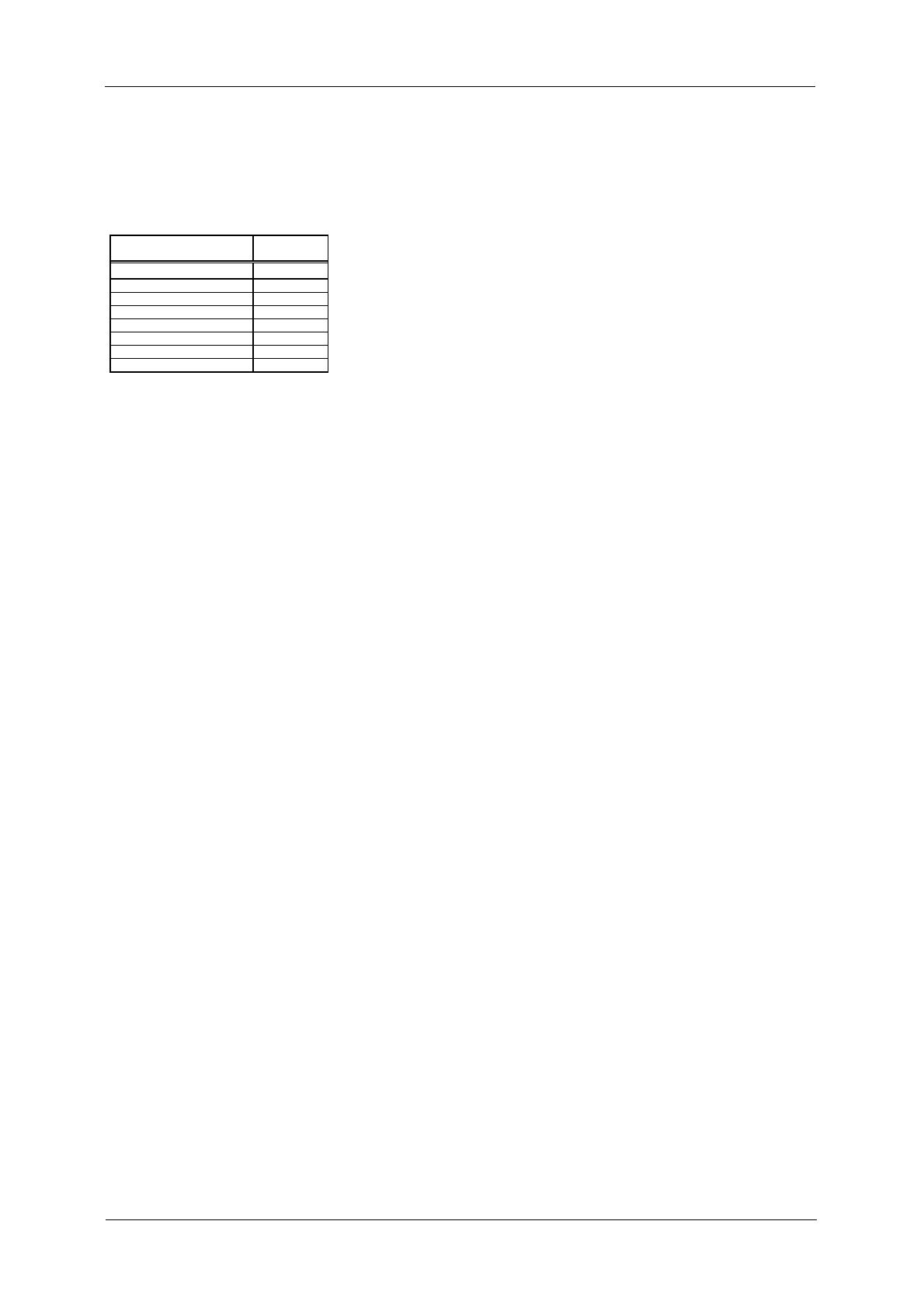
本ボードは、I/O アドレスの PCL6143 アクセス用の軸指定/動作・制御コマンドで使用している I/O ア
ドレス(下記表参照)に軸指定/コマンドを書き込むことにより、パルスの出力、停止、速度変更、ステ
ータスの確認などを行います。
軸指定/動作・制御コマンド
で使用している I/O アドレス
内容
+00h
軸 0
+08h
軸 1
+10h
軸 2
+18h
軸 3
+20h
軸 4
+28h
軸 5
+30h
軸 6
+38h
軸 7
また、I/O ベースアドレス+40h に汎用入出力制御用のチップ/軸指定/コマンドを書き込むことにより、
出力ピンの割り当て、入力ピンの機能選択、論理設定、およびそれらの状態確認などを行ない、+4Ch -
+5Ah を使用しデータの入出力を行います。
制御例は、C 言語スタイルで記述しています。OS/開発言語にあった形に変更してご使用ください。
4.1. 出力ポート
4.1.1. PCL6143 アクセスコマンド
PCL6143 所有のコマンドが使用可能です。詳細は、PCL6143 のユーザーズマニュアルを参照ください。
アクセス方法、コマンドも PCL6143 にアクセスする方法と全く同じですが、PCL6143 所有の汎用入出
力 P0 - P7、動作中信号 FUP, FDW, NVC、手動パルサなど外部パルスに関する信号 PA, PB, PE, +DR, -DR
についてのコマンド、ALM, INP, SD, LTC, PCS の論理設定コマンドは使用できません。ALM, INP, SD,
LTC, PCS, ERC, CP1, CP2 の論理設定は、「4.1.2 汎用入出力制御用コマンド」のオリジナルコマンド「入
出力論理設定」を使用してください。また、ERC, CP1, CP2 に関するコマンドを使用する際には、「4.1.2
汎用入出力制御用コマンド」のオリジナルコマンド「出力データ選択」を使用して、ERC, CP1, CP2 の
利用を有効に設定してからコマンドを実行してください。また、各コマンド実行後は 0.2μsec 以上のウ
ェイトを設けてください。
<プログラム例 1>
outpw( port0 + 0x00, 0x0150 ) ; //軸 0 選択、FL 定速スタートコマンド
<プログラム例 2>
outpw( port0 + 0x4, 下位データ) ; //軸 0 データ設定
outpw( port0 + 0x6, 上位データ) ; //軸 0 データ設定
outpw( port0 + 0x00, 0x0180 ) ; //軸 0 選択、移動量・目標位置設定コマンド
<プログラム例 3>
outpw( port0 + 0x44, 0x0000 ) ; //データ設定(OUT2:汎用出力 2、OUT1:汎用出力 1)
outpw( port0 + 0x46, 0x0002 ) ; //データ設定(OUT3:偏差カウンタクリア信号 ERC)
outpw( port0 + 0x40, 0x0131 ) ; //軸 0 選択、
出力データ選択コマンド
outpw( port0 + 0x44, 0x0000) ; //データ設定(+LIM,-LIM,IN7-IN1:負論理に設定)
outpw( port0 + 0x46, 0x0004 ) ; //データ設定(OUT3:正論理に設定、OUT2, OUT1:負論理に設定)
outpw( port0 + 0x40, 0x0132 ) ; //軸 0 選択、入出力論理設定コマンド
outpw( port0 + 0x00, 0x0124 ) ; //軸 0 選択、ERC 信号出力コマンド



















