CR 编号
内容 设定范围
HW
LW
通讯
地址
属性
#17
H’41A1
R/W 原点回归的脉冲信
号数 P 设定范围 -32,768 ~ +32,767 PLS;初始值:0 PLS
#18
H’41A2
R/W 原点回归模 H
MODE b0:原点回归模式,b1:原点回归 DOG 下降缘检测
#20
#19
H’41A3
R/W 原点位置定义 HP 设定范围 0 ~ ±999,999 unit*1;初始值:0 unit*1
#21
H’41A5
R/W 加速时间 Tacc 设定范围 10 ~ +32,767 ms;初始值:100 ms
#22
H’41A6
R/W 减速时间 Tdec 设定范围 10 ~ +32,767 ms;初始值:100 ms
#24
#23
H’41A7
R/W 目标位置(I) P(I) 设定范围 -2,147,483,648 ~ +2,147,483,647 unit*1 (-2,147,483,648 ~
+2,147,483,647 脉冲转换值) *2;初始值:0 unit*1
#26
#25
H’41A9
R/W 运转速度(I) V(I) 设定范围 -2,147,483,648 ~ +2,147,483,647 unit*1 (10 ~ 200 kPPS 的脉冲转
换值) *2;初始值:1,000 unit*1
#28
#27
H’41AB
R/W 目标位置(II) P(II) 设定范围 -2,147,483,648 ~ +2,147,483,647 unit*1 (-2,147,483,648 ~
+2,147,483,647 脉冲转换值) *2;初始值:0 unit*1
#30
#29
H’41AD
R/W 运转速度(II) V(II) 设定范围 0 ~ +2,147,483,647 unit*1 (10 ~ 200 kPPS 的脉冲转换值) *2;
初始值:2,000 unit*1
#31
H’41AF
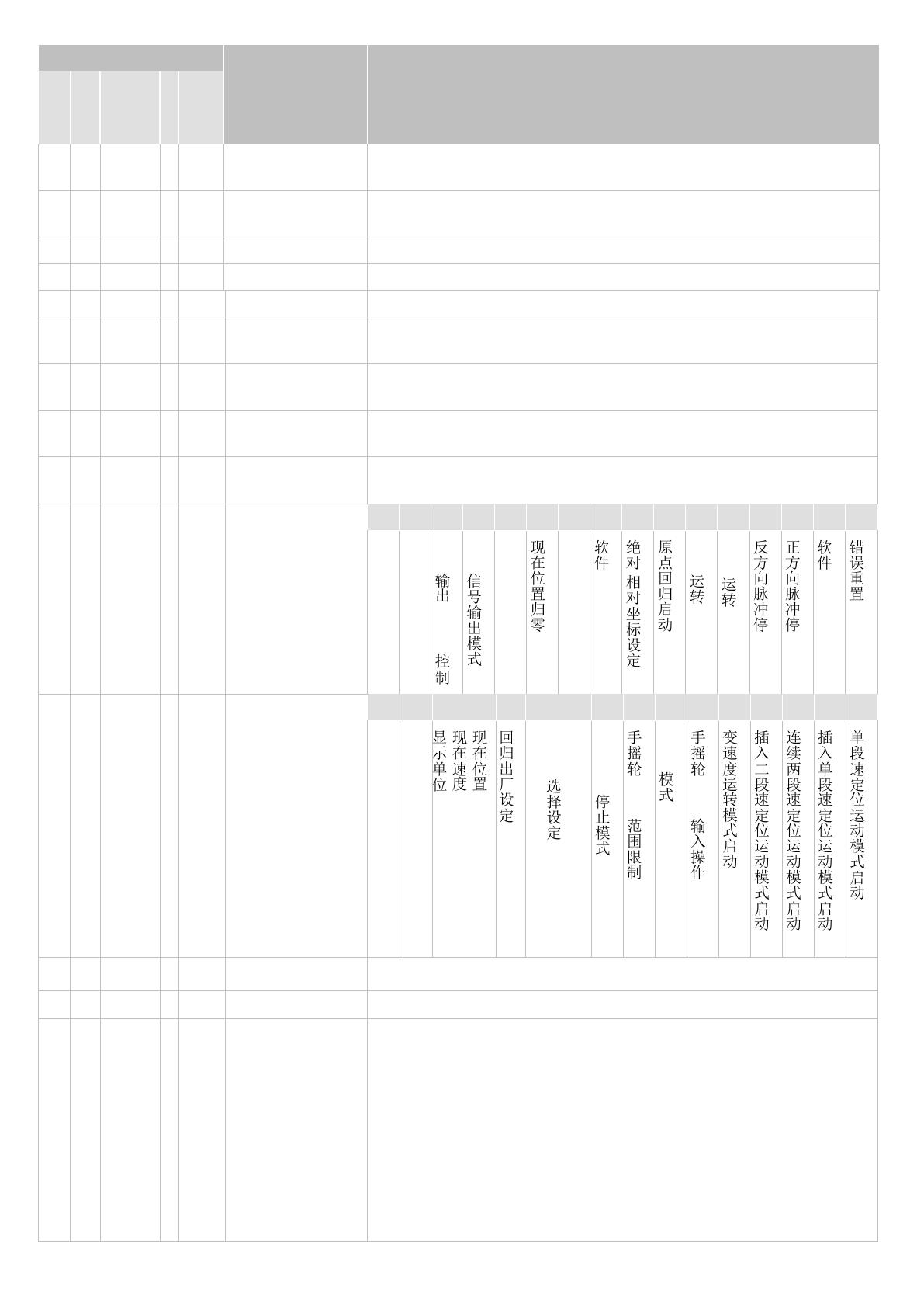
R/W 运转命令
初始值:H’0000
b15
b14
b13
b12
b11 b10
b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
- -
CLR On/Off
CLR
-
-
START
/
JOG-
JOG+
STOP
#32
H’41B0
R/W 工作模式
初始值:H’0001
b15
b14
b13 b12
b11~ b9 b8 b7 b6 b5 b4 b3 b2 b1 b0
- -
CR34, 33,
CR36, 35
MASK
LSP/LSN
MPG
STOP
MPG
#34
#33
H’41B1
R/W 现在位置 CP(PLS) 显示范围:-2,147,483,648~+2,147,483,647 PLS;初始值:0 PLS
#36
#35
H’41B3
R 现在速度 CS(PPS) 显示范围:0 ~ +2,147,483,647 PPS;初始值:0 PPS
#37
H’41B5
R/W 通讯地址及速率
(Baud Rate)设定
设定 RS-485 通讯地址,设定范围 01 ~ 254。出厂设定值为 K1。
设定通讯速率,共有 4,800, 9,600, 19,200bps, 38,400 bps, 57,600 bps, 115,200
bps 六种。ASCII 模式数据格式固定为 7Bit、偶位、1 stop bit ( 7 E 1),RTU
模式数据格式固定为 8Bit、偶位、1 stop bit ( 8 E 1)。
b0: 4,800 bps(位/秒)。 b1: 9,600 bps(位/秒)。(出厂设定值)
b2: 19,200 bps(位/秒 )。 b3: 38,400 bps(位/秒 )。
b4: 57,600 bps(位/秒 )。 b5: 115,200 bps(位/秒 )。
b6: 保留。 b7: 0为RTU 模式,1为ASCII 模式。
b8 ~ b15: 通讯地址。


















