- 15 -
(4) プログラム・パターンデータの書き込みおよび読み出し
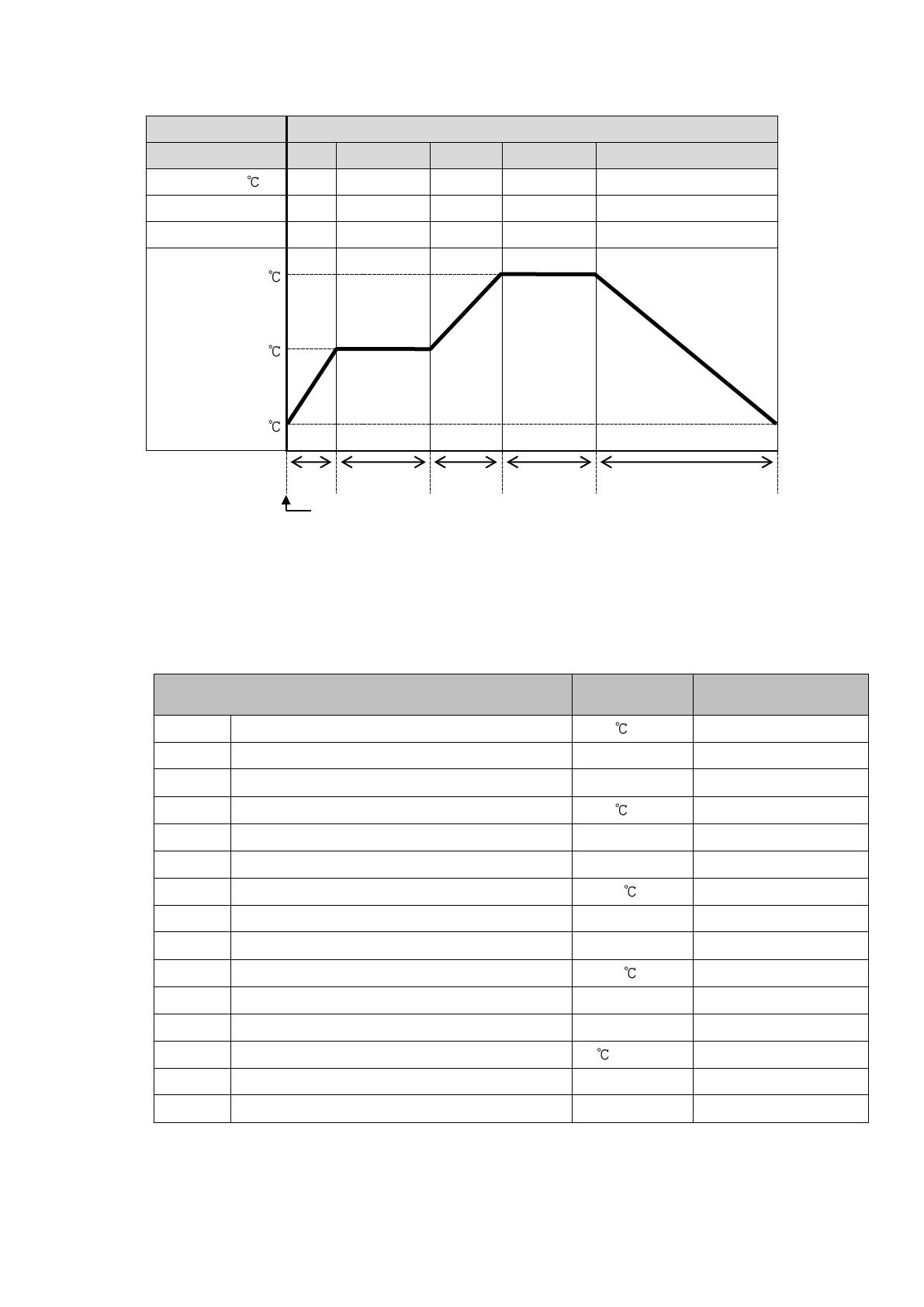
プログラム・パターン設定例
パターン番号 1
ステップ番号 1 2 3 4 5
ステップ SV( ) 500 500 1000 1000 0
ステップ時間 0:30 1:00 0:40 1:00 2:00
PID ブロック番号 1 1 2 2 1
1000
500
0
プログラム制御実行
図6.4.1-1
上記プログラム・パターンを書き込む場合のメッセージのデータ部は,以下のようになります。
データ数 : 15(000FH)
バイト数 : 30(1EH)
データ : 下表のデータを 16 進数に変換した値
データ項目 データ データ
進数に変換した値
2100H ステップ番号 1 ステップ SV 設定 500 01F4H
2101H ステップ番号 1 ステップ時間設定 30 分(0:30) 001EH
2102H ステップ番号 1 PID ブロック番号選択 1 0001H
2103H ステップ番号 2 ステップ SV 設定 500 01F4H
2104H ステップ番号 2 ステップ時間設定 60 分(1:00) 003CH
2105H ステップ番号 2 PID ブロック番号選択 1 0001H
2106H ステップ番号 3 ステップ SV 設定 1000 03E8H
2107H ステップ番号 3 ステップ時間設定 40 分(0:40) 0028H
2108H ステップ番号 3 PID ブロック番号選択 2 0002H
2109H ステップ番号 4 ステップ SV 設定 1000 03E8H
210AH ステップ番号 4 ステップ時間設定 60 分(1:00) 003CH
210BH ステップ番号 4 PID ブロック番号選択 2 0002H
210CH ステップ番号 5 ステップ SV 設定 0 0000H
210DH ステップ番号 5 ステップ時間設定 120 分(2:00) 0078H
210EH ステップ番号 5 PID ブロック番号選択 1 0001H



















